이족보행 로봇 마루
페이지 정보
작성자 비슈느쪽지보내기
메일보내기
자기소개
아이디로 검색
전체게시물
댓글 0건
조회 1,526회
작성일 10-10-18 20:31
비슈느쪽지보내기
메일보내기
자기소개
아이디로 검색
전체게시물
댓글 0건
조회 1,526회
작성일 10-10-18 20:31
본문
“머리 위 나무에는 맛있어 보이는 과일이 매달려 있다. 입을 가져가려 하지만 나무의 높이 때문인지 쉽지가 않다. 조금씩 허리를 곧추 세우고 앞다리를 천천히 들어서 나뭇가지에 가져간다. 조금 불편하긴 하지만 뒷다리만으로도 서 있기에 충분한 느낌이다. 앞발로 과일을 잡아 입에 가져간다. 두발로 서있는 불편함을 충분히 보상시켜주는 이 맛! 나는 ‘오스트랄로피테쿠스’다!” 위 글은 초기 인류의 이족보행 원인에 대한 여러 학설들 중 하나를 바탕으로 꾸며 본 가상의 이야기이다. 이처럼 초기의 인류는 두발로 걷기를 선택하였으며, 그러한 모습으로 수백만 년 동안 진화해왔다. 인간을 창조한 신으로부터 물려받은 본능에서일까? 현대의 인간은 이처럼 두 발로 걷는 자신의 모습을 닮은 피조물을 만들어내기에 이르렀는데, 그것이 바로 ‘이족보행 로봇’이다.
두 발로 서 있기는 그 자체가 곡예다 |

|
|



과학관에 전시 운영 중인 네트워크형 이족보행 로봇 ‘마루’. 마루는 직립된 자세에서도 쓰러짐을 방지하기 위하여 끊임없이 모터 등의 구동부에 힘을 주고 있으며, 외력이 들어온 상황에서 안정성을 유지하기 위해 몸체의 움직임을 달리하는 등 자세제어를 한다. 마루가 보행할 때는 한 쪽 다리에 로봇의 무게 및 정지마찰력 등을 집중시키고 진행방향으로 쓰러지기 시작한다. 이 때 다른 한 쪽의 다리가 먼저 진행방향으로 내디디고 다른 한 쪽에 걸려있던 힘을 이어받아 준다. 이러한 동작의 반복이 로봇 보행의 기본이다.
|
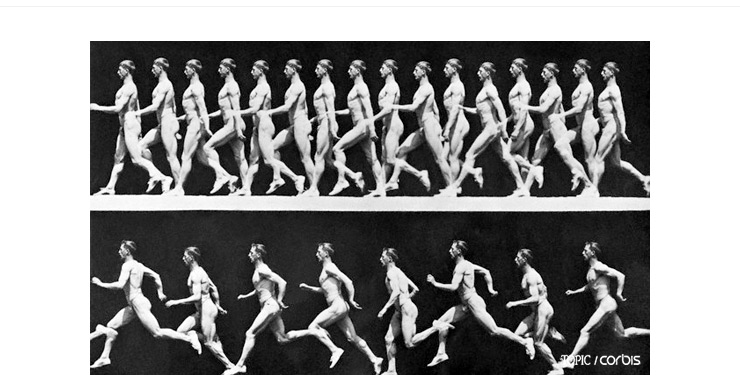
사람의 걷는 모습(위)와 뛰는 모습(아래)의 연속사진.

|


과학관에 전시 운영 중인 서비스 로봇. 이 로봇은 상반신은 인간과 유사한 형태이지만, 이동은 하체에 부착된 바퀴를 통해 이루어 진다. 이동속도는 오히려 ‘마루’보다 빠르며, 세 개의 바퀴가 달려있어 훨씬 안정적이다.
|
출처 : 유만선 / 국립과천과학관 전시기획총괄과 연구사
댓글목록
등록된 댓글이 없습니다.